季华实验室 | 七协作机械臂设计机器人
3赞|2评论|424人气|0收藏|2024-04-18 10:50:51
关注
私信
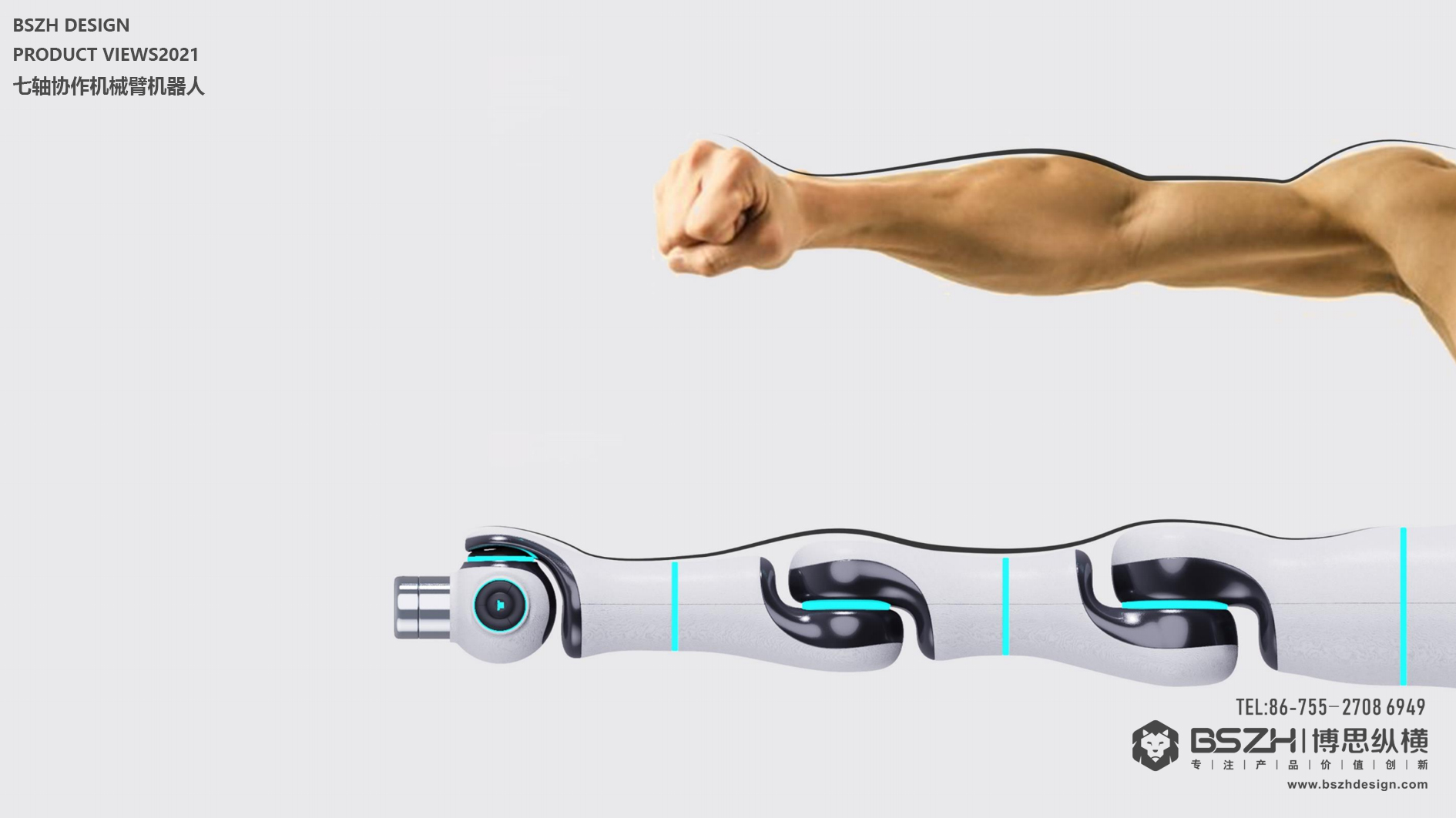
季华实验室 | 七协作机械臂设计机器人
服务内容:工业设计、产品设计、外观设计、产品体验
在现代科技水平快速发展的影响之下,越来越多的自动化机械出现在了我们的生活周围,尤其在一些大型的制造业或者工程建设当中,机械设备提供了很多的便捷和高效工作,尤其是机械臂的应用更是为生产建设提供很多便利,目前的机械臂大多还是采用气动力来驱动机械臂的各项操作,在进行较重物体夹取时旺旺需要耗费较大的动力输出才能实现不多的生产效果,这就使得机械臂需要消耗大量的能源,同时也对机械臂自身的韧性造成了一定的损伤,以利于长久的生产使用。一种拟人七自由度偏置机械臂逆解方法,涉及拟人七自由度机械臂逆解过程中机械臂初始姿态计算的一种方法,应用对象包括空间机械臂和地面机械臂,可应用于空间机械臂的任务规划,尤其更适用于障碍物规避,空间立体感更加形象。本发明是以冗余机械臂为研究对象,为相关运动学问题的研究奠定理论基础,并且该发明顺应了我国大力发展机器人行业,尤其发展空间机器人及其在轨服务技术的趋势,研究成果对未来空间机器人在轨服务的实际应用具有一定的理论和实际意义。
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
小小心意,大大鼓励
本作品版权归 博思纵横咨询设计 所有,禁止匿名转载及个人使用,任何商业用途均需联系原作者。
举报
3赞 2评论 454人气

6赞 2评论 515人气

4赞 2评论 444人气

4赞 3评论 511人气


 关注
点赞
收藏
关闭弹幕
留言
关注
点赞
收藏
关闭弹幕
留言
确认要删除该条评论吗?
小小心意,大大鼓励
最高赞赏200元
使用支付宝扫描二维码完成支付
使用微信扫描二维码完成支付
当前余额:¥0.00
支付操作会向你普象账户的注册手机号发送验证码
请注意查收

扫一扫添加
普象商务
扫一扫添加
客服微信

扫一扫下载
手机APP

请关注公众号iamdesign或扫码关注
 沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
加油呀
目测很灵活的啊